
Zhongming (Reaven) Huang
Incoming Ph.D. Student in Mechanical Engineering at the University of Colorado Boulder
Incoming Ph.D. Student in Mechanical Engineering at the University of Colorado Boulder
"Automation is no longer just a problem for those working in manufacturing. Physical labor was replaced by robots; mental labor is going to be replaced by AI and software." -- Andrew Yang
I am an incoming Ph.D. student in the Paul M. Rady Department of Mechanical Engineering at the University of Colorado Boulder, where I will be joining the PRAISe Lab under the supervision of Prof. Chahat Deep Singh in Fall 2025. Previously, I completed my Master’s degree in Electrical and Computer Engineering at Cornell University, where my research focused on collaborative robotic construction using quadrupedal robots. At Cornell, I was a member of Napp Lab and the Collective Embodied Intelligence (CEI) Lab, supervised by Prof. Nils Napp and Prof. Kirstin Petersen. My ultimate goal is to advance robust robotic systems that perform field tasks, reducing the need for workers to engage in tedious, physically demanding labor, or hazardous environments.
Sorry for any possible inconvenience due to the ongoing construction of this site!


This project presents a fully custom 3D-printed 280mm quadcopter (~500g), equipped with a Pixhawk 6C Mini, MTF-01 optical flow module, 40A 4-in-1 ESC, 1500mAh 3S LiPo battery, and four 2300KV motors with 5.5" props. Despite its improvised integration of FPV components, the system has proven stable in initial tests.
Current limitations include weight and battery life, especially with planned onboard perception (~250g, +8W). To address this, future redesign may use carbon fiber trusses with printed joints for better weight-to-strength ratio, and lower-KV motors (1400–1600KV) are being evaluated to improve efficiency.
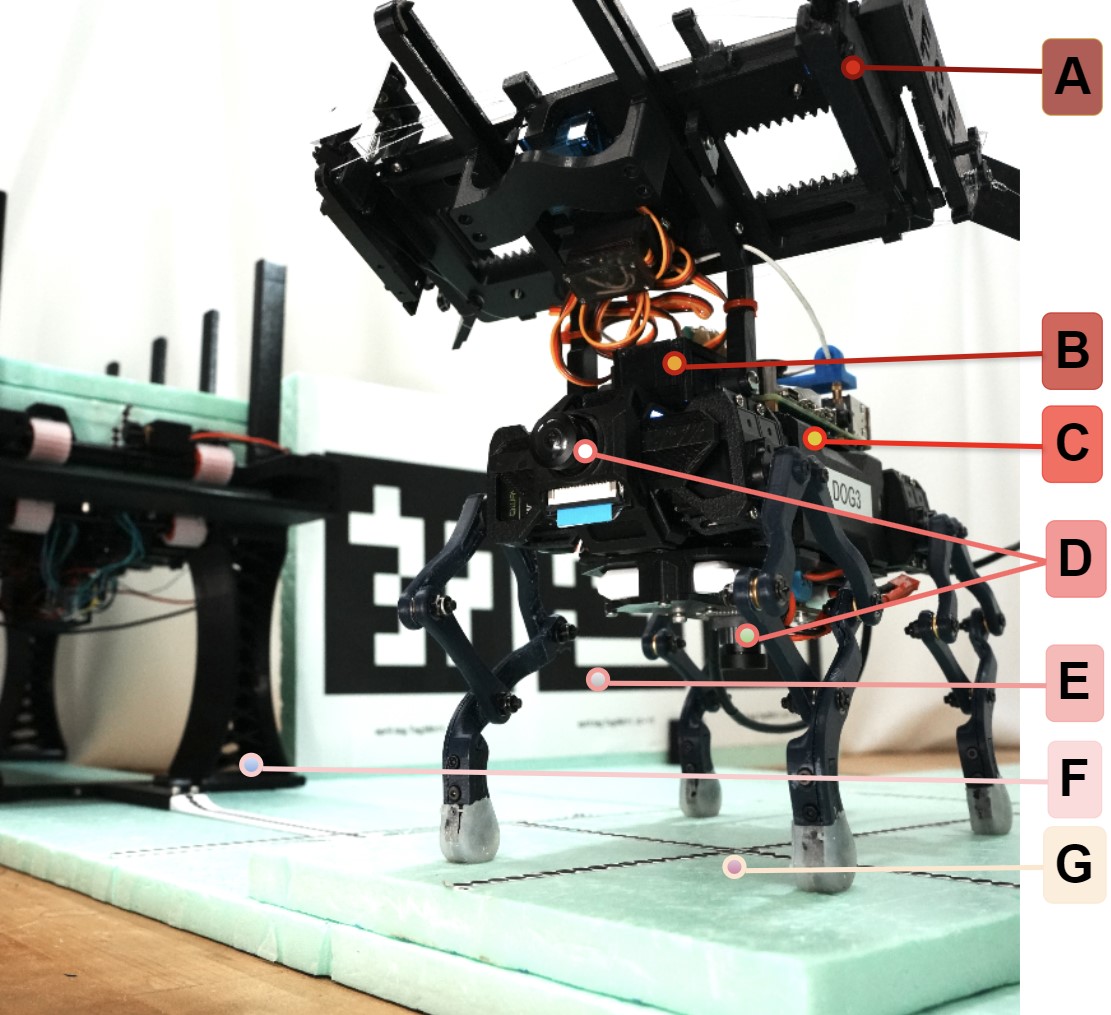
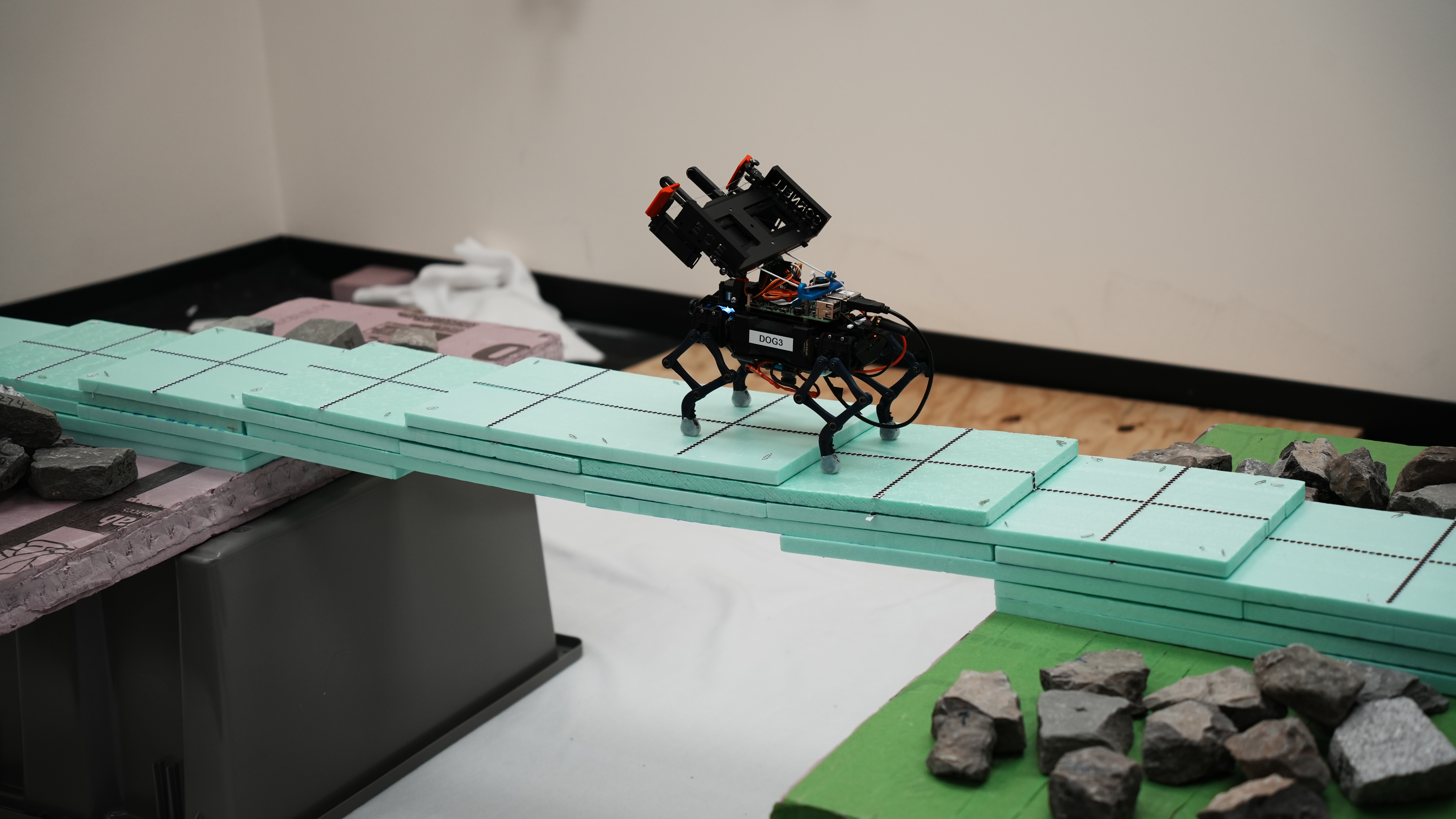

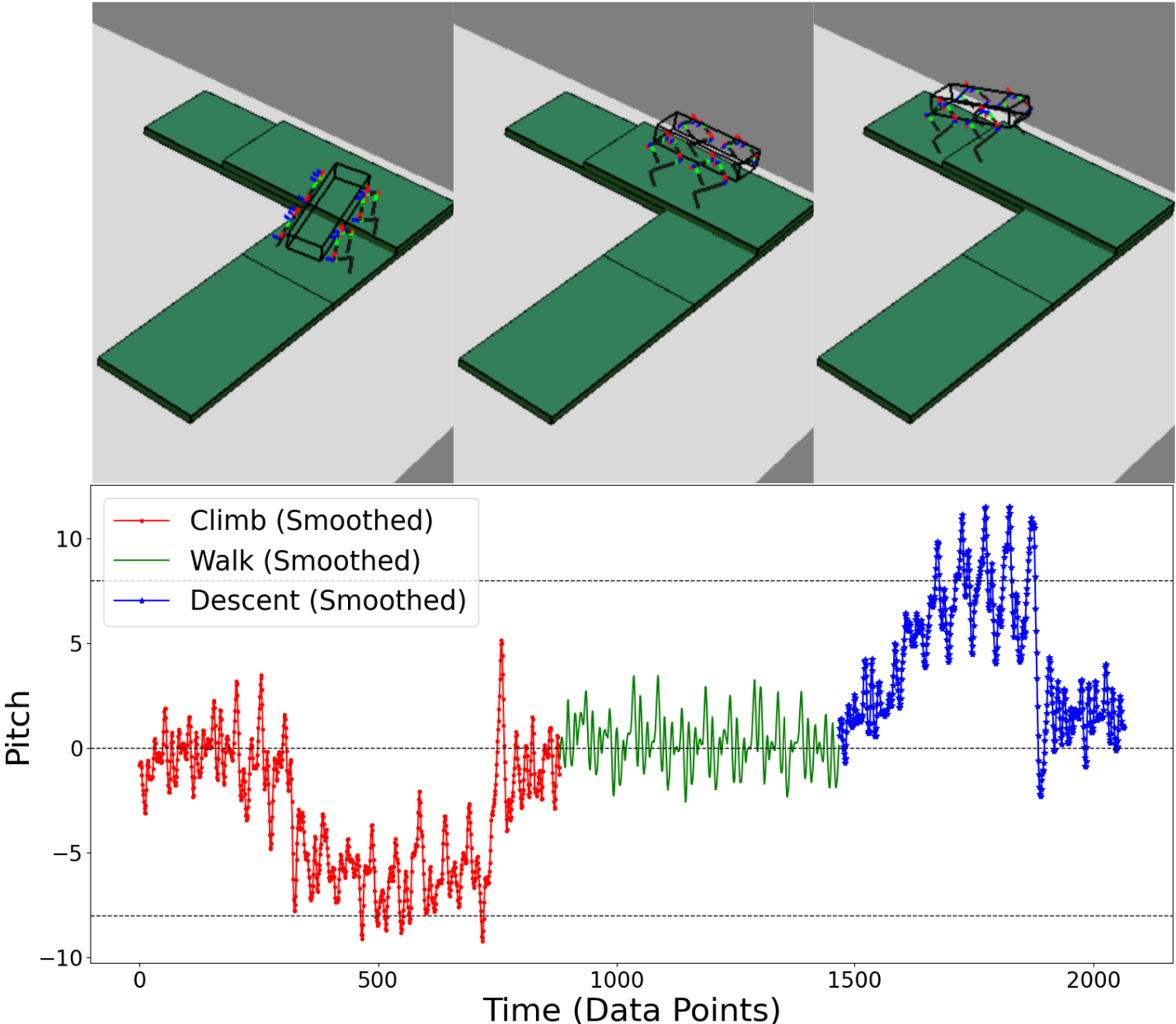
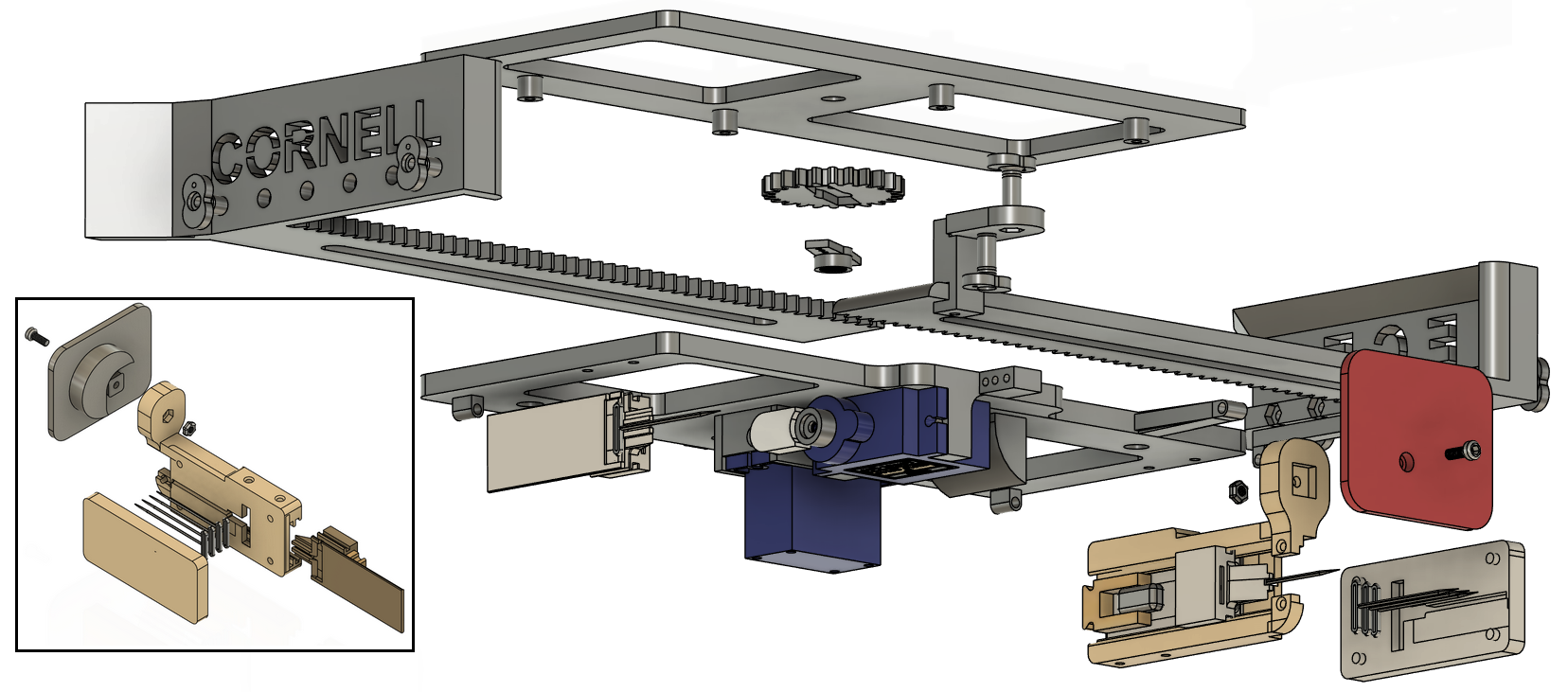
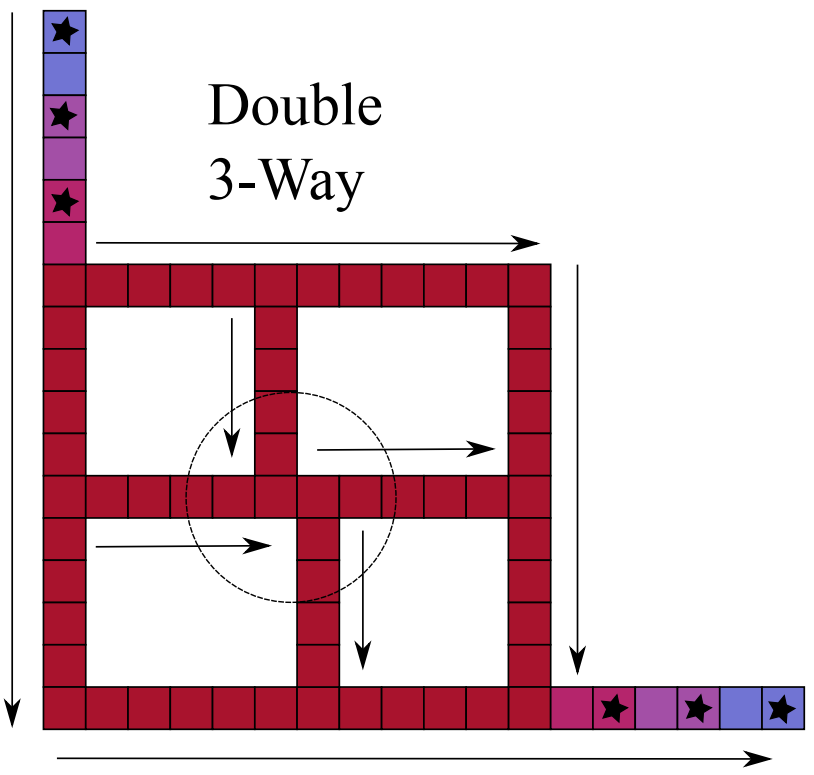
Each agent in this system is capable of retrieving, transporting, positioning and fixing minimally processed foam blocks with off-the-shelf T-pins. Instead of operating in the periphiral of the construction site, each agent considers the structure as a graph of traversable paths. This means the robots climb on the structure to build new blocks. Multi-robot collaboration is experimented in simulation with local behavior rules inspired by the TERMES system, with a focus on building with 2x1 blocks and constructing non-lattice structures.
Contributed paper Robotic Assembly of Reusable, Rectangular Blocks is to appear in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025.
Learn More
Experimenting with a convex MPC controller in python and simulate in MoJoCo. Code is adapted from Yinghan Sun's implementation of a Mini-Cheetah cMPC controller.
ECE 5280 Optimal System Analysis and Design, 2024
Learn More (TBD)

Assembled a 4-wheeled robot with 2 motors and minimal perception / computation. With a 6-DoF IMU, two ToF sensors and one Artemis Nano board, the robot is able to localize and navigate autonomously in a constrained environment.
ECE 5160 Fast Robots, 2024
Learn More
Traditional instance segmentation algorithms generates pixel-wise predictions to form closed areas for each instance, which may slow down inference speed and provides unintuitive position representation for each instance. This projects aims at encapsulating the instances' position with its center coordinates and vertices as a polygon. For each instance, the vertices are represented in a polar coordinate frame originated from the center coordinates of the instance. This concept is realized upon a commonly used object detection framework to ensure simplicity and speed.
In Journal of Physics, IOP Science, 2023
Excellent Senior Thesis Award, 2023 (Bachelor's Dissertation)
Learn More
Computer aided cancer diagnosis has great potential to help with prescreening of early-stage cancerous lesions. However, the dataset for training a diagnosis algorithm is limited compared to the scale needed. Small lesions of early stage cancers makes it even harder to collect sufficient data. This project aims at training a classification network in a weakly supervised manner, proposing an algorithm with self-attention to automatically compare an unknown CT scan with those labeled. With limited labeled data, this algoritm extracts context features of a small lesion and its nearby area. With these features, the algorithm is able to give probability of whether an unknown image contains a similar lesion.
In Proceedings of 2022 IEEE/ACIS International Conference on Computer and Information Science (ICIS) , 2022
Learn More
In field tasks, a common goal is to securely grasp an object that is occluded by other undesired targets. Also, in field tasks, it is unlikely to have multiple RGB-D cameras to surround the operation site. These together formulates the task as grasping the occluded target with one fixed RGB-D camera, which may require minimal removal of objects hampering a confident grasp. This work proposes an algorithm that decides the best-next-grasp, which minimizes the number of required intermediate grasps and maximizes the success of target object grasping.
In Proceedings of 2022 IEEE International Conference on Intelligent Autonomous Systems (ICoIAS), 2022
Best Paper Presentation Award at ICoIAS, 2022
Learn More



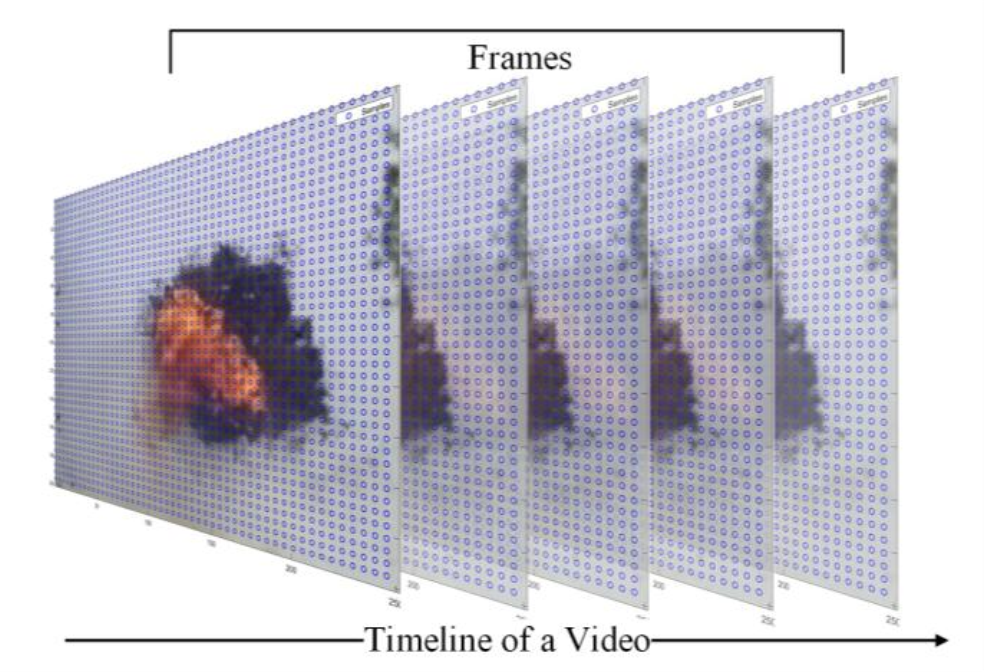
Hosted a provincially funded college student innovation project, with a theme of design and control of intelligent quadrotor drones. Package delivery is a topic demonstrating the stability and accuracy of a drone's sensing, control and actuation. We assembled a quadrotor drone, adapted the PID control loop along with the integration of a OpenMV camera, an optical flow and ToF sensors to enable its reliable operation in indoor environment. The task includes automatically take-off and landing, picking and placing objects in designated locations. The fire inspection drone has an Nvidia Jetson Nano with an IMX 219 camera to detect flame in real-time. A light weight flame detection algorithm was dedicated to be executed on board in real-time with less than 2GB RAM, which extracts brightness features of pixels in the temporal domain as inputs of a binary classifier.
In Proceedings of 2022 IEEE International Conference on Pattern Recognition and Machine Learning (PRML), 2022
Best Paper Presentation Award at PRML, 2022
P.R.China Software Copyright, 2022
Provincial Second Prize of the 7th National College Student Engineering Training Ability Comprehensive Competition, 2021
Learn More (TBD)In 2020, I served as part of the production crew for the WULA YoungTime Summer Music Festival while working part-time at WULA Ltd. WULA is a non-profit student organization founded by students and alumni from Changjun High School of Changsha, aiming to provide entertainment activities, alumni networking, and information services for the student community. The music festival was also non-profit, featuring free ticket bookings and fundraising efforts that raised over ¥300,000 (~$45,000) from commercial sponsors. These funds covered expenses such as venue rental, crew payments, stage setup, performance materials, and security.



